En topología diferencial, un haz de jets es una construcción que genera un nuevo fibrado diferenciable de un haz dado de fibras suaves. Hace posible escribir ecuaciones diferenciales en secciones de un haz de fibras en una forma invariante. Los jets también se pueden ver como las versiones de la serie de Taylor libres de coordenadas.
Históricamente, los haces de jets se atribuyen a Ehresmann, y fueron un avance en el método (prolongación) de Élie Cartan, de tratar geométricamente con derivadas sucesivas, al imponer condiciones diferenciales a las variables formales recientemente introducidas. Los haces de jets a veces se llaman espráis, aunque los espráis por lo general se refieren más específicamente al campo vectorial asociado inducido en el haz correspondiente (por ejemplo, el espray geodésico en variedades de Finsler).
Más recientemente, los haces de jets han aparecido como una forma concisa para describir los fenómenos asociados con las aplicaciones de derivadas, en particular las asociadas con el cálculo de variaciones. En consecuencia, ahora se reconoce que el haz de jets es el dominio correcto para la teoría de campo covariante geométrica clásica, y se realiza mucho trabajo en las formulaciones de campos en la relatividad general que utilizan este enfoque.
Jets
Artículo principal: Jet (matemáticas)
Supóngase que M es una variedad m-dimensional y que (E, π, M) es un fibrado. Para p ∈ M, sea Γ(p) el conjunto de todas las secciones locales cuyo dominio contiene p. Se define I = (I(1), I(2), ..., I(m)) como una entidad multi indexada no ordenada (una m-tupla de enteros), tal que
Defínanse las secciones locales σ, η ∈ Γ(p) que tienen el mismo r-jet en p si
La relación de que dos aplicaciones tienen el mismo r-jet es una relación de equivalencia. Un r-jet es una clase de equivalencia bajo esta relación, y el r-jet con el representante σ se denota . El número entero r también se llama orden del jet, p es su fuente y σ(p) es su objetivo.
Variedades de jet
El r-ésimo múltiplo del jet de π es el conjunto
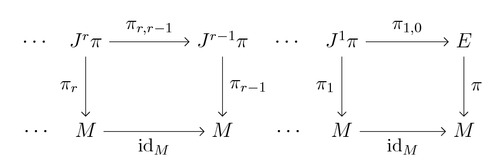
Se pueden definir las proyecciones πr y πr,0 denominadas proyecciones fuente y objetivo, respectivamente, por
Si 1 ≤ k ≤ r, entonces un k-jet es la función πr,k definida por
De esta definición, está claro que πr = π o πr,0 y que si 0 ≤ m ≤ k, entonces πr,m = πk,m o πr,k. Es convencional considerar πr,r como la función identidad en J r(π) e identificar J0(π) con E.
Un sistema de coordenadas en E generará un sistema de coordenadas en J r (π). Sea (U, u) un atlas adaptado en E, donde u = (xi, uα). El gráfico de coordenadas inducidas (Ur,ur) en J r (π) se define por
donde
y las funciones son conocidas como las coordenadas derivadas:
Dado un atlas de mapas adaptados (U, u) en E, la colección correspondiente de mapas (U r, u r) es un atlas de dimensión finitaC∞ sobre J r( π).
Haces de jets
Dado que el atlas en cada Jr (π) define una variedad, las tripletas (Jr (π), πr,k, Jk (π)), (Jr (π), πr,0, E) y (Jr (π), πr, M) definen todas las variedades de fibras. En particular, si (E, π, M) es un paquete de fibras, el triplete (Jr (π), πr, M) define el r-ésimo jet de π.
Si W ⊂ M es una subvariedad abierta, entonces
Si p ∈ M, entonces la fibra se denota como .
Sea σ una sección local de π con dominio W ⊂ M. La r-prolongación del jet de σ es la aplicación jrσ: W → Jr (π) definido por
Téngase en cuenta que πr o jrσ = idW, por lo que jrσ realmente es una sección. En coordenadas locales, jrσ viene dada por
identificando j0σ con σ.
Perspectiva algebraico-geométrica
A continuación se da una construcción motivada independientemente del haz de secciones .
Considérese una aplicación diagonal , donde el múltiplo diferenciable es un espacio localmente anillado por para cada abierto. Sea la banda ideal , de manera equivalente sea el haz de gérmenes diferenciables que se anulan en para todos los . La imagen inversa de la teoría de haces de a por es el haz de k-jets.[1]
El límite directo de la secuencia de aplicaciones inyectivas dada por las inclusiones canónicas de haces da lugar al haz infinito de jets. Obsérvese que debido a la construcción de límite directo se trata de un anillo filtrado.
Ejemplo
Si π es el fibrado (M × R, pr1, M), entonces existe un difeomorfismo canónico entre el primer haz de jets J1 (π) y T * M × R. Para construir este difeomorfismo, para cada σ en ΓM (π), debe escribirse como .
Entonces, cada vez que p ∈ M
En consecuencia, la aplicación
está bien definida y es claramente una función inyectiva. Transcribirlo a coordenadas demuestra que es un difeomorfismo, porque si (xi, u) son coordenadas en M × R, donde u = idR es la identidad de coordenadas, entonces las coordenadas derivadas ui en J1(π) corresponden a las coordenadas ∂i en T * M.
Del mismo modo, si π es el haz trivial (R × M, pr1, R), entonces existe un difeomorfismo canónico entre J1(π) y R × TM.
Estructura de contacto
El espacio Jr(π) tiene una distribución natural, es decir, un subconjunto del fibrado tangenteTJr(π), llamado distribución de Cartan. La distribución de Cartan se extiende por todos los planos tangentes a gráficos de secciones holonómicas; es decir, secciones de la forma jrφ, siendo φuna sección de π.
El inverso de la distribución de Cartan es un espacio diferencial de forma 1, llamado forma de contacto en Jr(π). El espacio de formas únicas diferenciables en Jr(π) se denota por y el espacio de formas de contacto se denota por . Una forma es una forma de contacto siempre que su aplicación regrediente en cada prolongación sea cero. En otras palabras, es una forma de contacto si y solo si
para todas las secciones locales σ de π sobre M.
La distribución de Cartan es la estructura geométrica principal en los espacios de jets y juega un papel importante en la teoría geométrica de las ecuaciones en derivadas parciales. Las distribuciones de Cartan son completamente no integrables. En particular, no son involutivas. La dimensión de la distribución de Cartan crece con el orden del espacio del jet. Sin embargo, en el espacio de jets infinitos J∞, la distribución de Cartan se vuelve involutiva y de dimensión finita: su dimensión coincide con la dimensión de la variedad de base M.
Ejemplo
Considésese el caso (E, π, M), donde E ≃ R2 y M ≃ R. Entonces, (J1(π), π, M) define el primer haz de jets, y puede expresarse en las coordenadas (x, u, u1), donde
para todos los p ∈ M y σ en Γp(π). Una 1-forma general en J1(π) tiene la expresión
Una sección σ en Γp(π) tiene una primera prolongación
Por lo tanto, (j1σ) * θ se puede calcular como
Esta expresión se anulará para todas las secciones σ si y solo si c = 0 y a = -bσ'(x). Por lo tanto, θ = b (x, u, u1) θ0 debe ser necesariamente un múltiplo de la forma básica de contacto θ0 = du-u1dx. Continuando con el segundo espacio de jets J2(π) con la coordenada adicional u2, tal que
se genera una 1-forma general con la construcción
Este es una forma de contacto si y solo si
lo que implica que e = 0 y a = -bσ'(x)-cσ(x). Por lo tanto, θ es una forma de contacto si y solo si
donde θ1 = du1-u2dx es la siguiente forma de contacto básico (téngase en cuenta que aquí se está identificando la forma θ0 con su regrediente sobre J2(π)).
En general, proporcionando x, u ∈ R, una forma de contacto en Jr+1(π) se puede escribir como una combinación lineal de las formas de contacto básicas
donde
Argumentos similares conducen a una caracterización completa de todas las formas de contacto.
En coordenadas locales, cada contacto de una forma en Jr+1(π) se puede escribir como una combinación lineal
con coeficientes diferenciables de los formas de contacto básicas
|I| se conoce como el orden de la forma de contacto . Téngase en cuenta que las formas de contacto en Jr+1(π) tienen órdenes r como máximo. Las formas de contacto proporcionan una caracterización de aquellas secciones locales de πr+1 que son prolongaciones de secciones de π.
Sea ψ ∈ ΓW(πr+1), entonces ψ = jr+1σ donde σ ∈W(π) si y solo si
Campos vectoriales
Un campo vectorial general sobre el espacio total E, coordenado por , es
Un campo vectorial se llama horizontal si todos los coeficientes verticales desaparecen cuando = 0.
Un campo vectorial se llama vertical si todos los coeficientes horizontales desaparecen cuando ρi = 0.
Para (x, u) fijo, se identifica
teniendo coordenadas (x, u, ρi, φα), con un elemento en la fibra TxuE de TE sobre (x, u) en E, llamado un vector tangente en TE. Una sección
se llama un campo vectorial en E con
y ψ en Γ(TE).
El haz de planos Jr(π) está coordenado por . Para (x, u, w) fijo, se identifica
con las coordenadas
con un elemento en el haz de TJr(π) sobre (x, u, w) ∈ Jr(π), llamado un vector tangente en TJr(π). Aquí,
son funciones con valores reales en Jr(π). Una sección
es un campo vectorial en Jr(π), y se dice que
Ecuaciones diferenciales parciales
Sea (E, π, M) un haz de fibras. Una ecuación en derivadas parciales de 'r-ésimo orden en π es una variedad cerrada embebida en la subvariedad S de la variedad de jets Jr (π). Una solución es una sección local σ ∈ W(π) que satisface , para todo p en M.
Considérese un ejemplo de una ecuación diferencial parcial de primer orden:
Ejemplo
Sea π el haz trivial (R2 × R, pr1, R2) con coordenadas globales (x1, x' '2, u1). Entonces la aplicación F: J1 (π) → R definida por
da lugar a la ecuación diferencial
que se puede escribir como
En particular
tiene una primera prolongación dada por
y es una solución de esta ecuación diferencial, porque
y entonces para cada p ∈ 'R' 2.
Prolongación de un jet
Un difeomorfismo local ψ: Jr(π) → Jr (π) define una transformación de contacto de orden r si preserva el contacto ideal, lo que significa que si θ es cualquier forma de contacto en Jr(π), entonces ψ * θ también es una forma de contacto.
El flujo generado por un campo vectorial Vr en el espacio de jets Jr (π) forma un grupo de un solo parámetro de transformaciones de contacto si y solo si la derivada de Lie de cualquier forma de contacto θ conserva el contacto ideal.
Para el caso de primer orden, se considera un campo de vectores general V1 en J1 (π), dado por
Ahora se aplica a las formas de contacto básicas y se amplia la derivada exterior de las funciones en términos de sus coordenadas para obtener:
Por lo tanto, V1 determina una transformación de contacto si y solo si los coeficientes de dxi y desaparecen. Los últimos requisitos implican las condiciones de contacto
Los requisitos anteriores proporcionan fórmulas explícitas para los coeficientes de los primeros términos derivados en V1:
donde
denota el truncamiento de orden cero-ésimo de la derivada total Di.
Por lo tanto, las condiciones de contacto únicamente prescriben la prolongación de cualquier punto o campo vectorial de contacto. Es decir, si satisface estas ecuaciones, Vr se denomina r-ésima prolongación de V a un campo vectorial en Jr(π).
Estos resultados se entienden mejor cuando se aplican a un ejemplo particular:
Ejemplo
Considérese el caso (E, π, M), donde E ≅ R2 y M ≃ R. Entonces, (J1(π), π, E) define el primer haz del jet, y puede ser coordenado por (x, u, u1), donde
para todos los p ∈ M y σ en Γp(π). Un forma de contacto en J1(π) tiene la propiedad de que
Considérese ahora un vector V en E, teniendo la forma
Entonces, la primera prolongación de este campo vectorial a J1(π) es
Si ahora se toma la derivada de Lie de la forma de contacto con respecto a este campo de vector prolongado, se obtiene
Por lo tanto, para la preservación del contacto ideal, se requiere que
Y entonces la primera prolongación de V a un campo de vectores en J1(π) es
Calculando también la segunda prolongación de V a un campo vectorial en J2(π), se tienen como coordenadas en J2(π). Por lo tanto, el vector prolongado tiene la forma
Las formas de contacto son
Para preservar el contacto ideal, se requiere
Ahora, θ no tiene dependencia de u2. Por lo tanto, a partir de esta ecuación se deduce la fórmula para ρ, que necesariamente será el mismo resultado encontrado para V1. Por lo tanto, el problema es análogo a la prolongación del campo vectorial V1 a J2 (π). Es decir, se puede generar la r-ésima prolongación de un campo vectorial mediante la aplicación recursiva de la derivada de Lie de las formas de contacto con respecto a los campos vectoriales prolongados r veces. Entonces se tiene que
y entonces
Por lo tanto, la derivada de Lie de la segunda forma de contacto con respecto a V2 es
Por lo tanto, para que preserve el contacto ideal, es necesario que
Y entonces, la segunda prolongación de V a un campo de vectores en J2(π) es
Hay que tener en cuenta que la primera prolongación de V se puede recuperar al omitir los términos de la segunda derivada en V2, o al proyectar de nuevo a J1 (π).
Espacios de jets infinitos
El límite inverso de la secuencia de proyecciones da lugar al "espacio de jets infinito J∞(π). Un punto es la clase de equivalencia de las secciones de π que tienen el mismo k-jet en p que en σ para todos los valores de k. La proyección natural π∞ asigna a p.
Solo pensando en términos de coordenadas, J∞(π) parece ser un objeto geométrico de dimensión infinita. De hecho, la forma más simple de introducir una estructura diferenciable en J∞(π), sin depender de gráficos diferenciables, viene dada por el cálculo diferencial sobre álgebras acumulativas. Dual a la secuencia de proyecciones de variedades es la secuencia de aplicaciones inyectivas de álgebras conmutativas. Denotando simplemente por , el límite directo de será un álgebra conmutativa, que se puede suponer que es el álgebra de las funciones suaves sobre el objeto geométrico J∞(π). Obsérvese que , que nace como un límite directo, tiene una estructura adicional: es un álgebra conmutativa filtrada.
A grandes rasgos, un elemento concreto siempre pertenecerá a algún , por lo que es una función suave en variedad de dimensión finita Jk (π) en el sentido habitual.
Ecuaciones en derivadas parciales infinitamente prolongadas
Dado un sistema de ecuaciones en derivadas parciales de orden k-ésimo E ⊆ Jk(π), la variedad de funciones suaves I(E) que se anulan en E sobre 'J∞(π) es un ideal en el álgebra , y por lo tanto también lo es en el límite directo .
Complétese I(E) agregando todas las composiciones posibles totalmente derivables aplicadas a todos sus elementos. De esta forma se obtiene un nuevo I, ideal de que ahora se cierra bajo la operación de poseer derivada total. La subvariedad E(∞) de J∞(π) recortada por I se llama prolongación infinita de E.
Geométricamente, "E"(∞) es la variedad de soluciones formales de E. Se puede ver fácilmente que un punto de E(∞) está representado por una sección σ cuyo gráfico de k-jets es tangente a E en el punto con un orden arbitrariamente alto de tangencia.
Analíticamente, si E viene dado por φ = 0, una solución formal puede entenderse como el conjunto de coeficientes de Taylor de una sección σ en un punto p que hace desaparecer la serie de Taylor de en el punto p.
Lo más importante es que las propiedades de cierre de I implican que E(∞) es tangente a la estructura de contacto de orden infinito en J∞(π), de modo que al restringir a E(∞) se obtiene el diffiety, y se puede estudiar la secuencia C-espectral asociada.
Observaciones
Este artículo ha definido jets de secciones locales de un haz, pero es posible definir jets de funciones f: M → N, donde M y N son múltiples; el jet de f simplemente corresponde al jet de la sección
grf: M → M × N
grf (p) = (p, f (p))
(grf se conoce como el gráfico de la función f) del haz trivial (M × N, π1, M ). Sin embargo, esta restricción no simplifica la teoría, ya que la trivialidad global de π no implica la trivialidad global de π1.
↑Vakil, Ravi (25 de agosto de 1998). «A beginner's guide to jet bundles from the point of view of algebraic geometry». Consultado el 25 de junio de 2017.
Bibliografía
Ehresmann, C., "Introducción a la teoría de las estructuras infinitésimales et des pseudo-groupes de Lie". Geometrie Differentielle , Colloq. Enterrar. du Centre Nat. de la Recherche Scientifique, Estrasburgo, 1953, 97-127.
Kolář, I., Michor, P., Slovák, J., Operaciones naturales en geometría diferencial. Springer-Verlag: Berlin Heidelberg, 1993 .ISBN 3-540-56235-4, ISBN 0-387-56235-4.
Saunders, D. J., "La geometría de los paquetes de Jet", Cambridge University Press, 1989, ISBN 0-521-36948-7
Krasil'shchik, I. S., Vinogradov, A. M., [et al.], "Simetrías y leyes de conservación para ecuaciones diferenciales de física matemática", Amer. Mates. Soc., Providence, RI, 1999, ISBN 0-8218-0958-X.
Olver, P. J., "Equivalencia, invariantes y simetría", Cambridge University Press, 1995, ISBN 0-521-47811-1
Giachetta, G., Mangiarotti, L., Sardanashvily, G., "Teoría avanzada del campo clásico", World Scientific, 2009, ISBN 978-981-283-895-7
Sardanashvily, G., Geometría diferencial avanzada para teóricos. Paquetes de fibras, colectores de chorro y teoría de Lagrange ", Lambert Academic Publishing, 2013, ISBN 978-3-659-37815-7; arXiv: 0908.1886






































![{\displaystyle {\begin{aligned}(j_{p}^{1}\sigma )^{*}\theta &=\theta \circ j_{p}^{1}\sigma \\&=a(x,\sigma (x),\sigma '(x))dx+b(x,\sigma (x),\sigma '(x))d(\sigma (x))+c(x,\sigma (x),\sigma '(x))d(\sigma '(x))\\&=a(x,\sigma (x),\sigma '(x))dx+b(x,\sigma (x),\sigma '(x))\sigma '(x)dx+c(x,\sigma (x),\sigma '(x))\sigma ''(x)dx\\&=[a(x,\sigma (x),\sigma '(x))+b(x,\sigma (x),\sigma '(x))\sigma '(x)+c(x,\sigma (x),\sigma '(x))\sigma ''(x)]dx\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aae50e700f899ba3c64ab9c595be19c8e9293431)


![{\displaystyle {\begin{aligned}(j_{p}^{2}\sigma )^{*}\theta &=\theta \circ j_{p}^{2}\sigma \\&=a(x,\sigma (x),\sigma '(x),\sigma ''(x))dx+b(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma (x))+\\&\qquad \qquad +c(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma '(x))+e(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma ''(x))\\&=adx+b\sigma '(x)dx+c\sigma ''(x)dx+e\sigma '''(x)dx\\&=[a+b\sigma '(x)+c\sigma ''(x)+e\sigma '''(x)]dx\\&=0\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/89b2e64862308e15a90c1c0312a327da8ed73f98)


































![{\displaystyle {\begin{aligned}{\mathcal {L}}_{V^{1}}(\theta _{0}^{\alpha })&={\mathcal {L}}_{V^{1}}(du^{\alpha }-u_{i}^{\alpha }dx^{i})\\&={\mathcal {L}}_{V^{1}}du^{\alpha }-({\mathcal {L}}_{V^{1}}u_{i}^{\alpha })dx^{i}-u_{i}^{\alpha }({\mathcal {L}}_{V^{1}}dx^{i})\\&=d(V^{1}u^{\alpha })-V^{1}u_{i}^{\alpha }dx^{i}-u_{i}^{\alpha }d(V^{1}x^{i})\\&=d\phi ^{\alpha }-\chi _{i}^{\alpha }dx^{i}-u_{i}^{\alpha }d\rho ^{i}\\&={\frac {\partial \phi ^{\alpha }}{\partial x^{i}}}dx^{i}+{\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}du^{k}+{\frac {\partial \phi ^{\alpha }}{\partial u_{i}^{k}}}du_{i}^{k}-\chi _{i}^{\alpha }dx^{i}-u_{i}^{\alpha }\left[{\frac {\partial \rho ^{i}}{\partial x^{m}}}dx^{m}+{\frac {\partial \rho ^{i}}{\partial u^{k}}}du^{k}+{\frac {\partial \rho ^{i}}{\partial u_{m}^{k}}}du_{m}^{k}\right]\\&={\frac {\partial \phi ^{\alpha }}{\partial x^{i}}}dx^{i}+{\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}(\theta ^{k}+u_{i}^{k}dx^{i})+{\frac {\partial \phi ^{\alpha }}{\partial u_{i}^{k}}}du_{i}^{k}-\chi _{i}^{\alpha }dx^{i}-u_{l}^{\alpha }\left[{\frac {\partial \rho ^{l}}{\partial x^{i}}}dx^{i}+{\frac {\partial \rho ^{l}}{\partial u^{k}}}(\theta ^{k}+u_{i}^{k}dx^{i})+{\frac {\partial \rho ^{l}}{\partial u_{i}^{k}}}du_{i}^{k}\right]\\&=\left[{\frac {\partial \phi ^{\alpha }}{\partial x^{i}}}+{\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}u_{i}^{k}-u_{l}^{\alpha }\left({\frac {\partial \rho ^{l}}{\partial x^{i}}}+{\frac {\partial \rho ^{l}}{\partial u^{k}}}u_{i}^{k}\right)-\chi _{i}^{\alpha }\right]dx^{i}+\left[{\frac {\partial \phi ^{\alpha }}{\partial u_{i}^{k}}}-u_{l}^{\alpha }{\frac {\partial \rho ^{l}}{\partial u_{i}^{k}}}\right]du_{i}^{k}+\left({\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}-u_{l}^{\alpha }{\frac {\partial \rho ^{l}}{\partial u^{k}}}\right)\theta ^{k}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/95f44e49df99aa30e9fbaa0c05c1c92b25296603)










![{\displaystyle {\begin{aligned}{\mathcal {L}}_{V^{1}}(\theta )&={\mathcal {L}}_{V^{1}}(du-u_{1}dx)\\&={\mathcal {L}}_{V^{1}}du-({\mathcal {L}}_{V^{1}}u_{1})dx-u_{1}({\mathcal {L}}_{V^{1}}dx)\\&=d(V^{1}u)-V^{1}u_{1}dx-u_{1}d(V^{1}x)\\&=dx-\rho (x,u,u_{1})dx+u_{1}du\\&=(1-\rho (x,u,u_{1}))dx+u_{1}du\\&=[1-\rho (x,u,u_{1})]dx+u_{1}(\theta +u_{1}dx)&&du=\theta +u_{1}dx\\&=[1+u_{1}u_{1}-\rho (x,u,u_{1})]dx+u_{1}\theta \end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a9b0a6baccf127763f527a820218a30a39a13cee)








![{\displaystyle {\begin{aligned}{\mathcal {L}}_{V^{2}}(\theta _{1})&={\mathcal {L}}_{V^{2}}(du_{1}-u_{2}dx)\\&={\mathcal {L}}_{V^{2}}du_{1}-({\mathcal {L}}_{V^{2}}u_{2})dx-u_{2}({\mathcal {L}}_{V^{2}}dx)\\&=d(V^{2}u_{1})-V^{2}u_{2}dx-u_{2}d(V^{2}x)\\&=d(1+u_{1}u_{1})-\phi (x,u,u_{1},u_{2})dx+u_{2}du\\&=2u_{1}du_{1}-\phi (x,u,u_{1},u_{2})dx+u_{2}du\\&=2u_{1}du_{1}-\phi (x,u,u_{1},u_{2})dx+u_{2}(\theta +u_{1}dx)&du&=\theta +u_{1}dx\\&=2u_{1}(\theta _{1}+u_{2}dx)-\phi (x,u,u_{1},u_{2})dx+u_{2}(\theta +u_{1}dx)&du_{1}&=\theta _{1}+u_{2}dx\\&=[3u_{1}u_{2}-\phi (x,u,u_{1},u_{2})]dx+u_{2}\theta +2u_{1}\theta _{1}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb664bd3ffac7f60ba361f8caa7581acd7a422f8)














 Datos: Q6188933
Datos: Q6188933








